世界坐标系
世界坐标系是一个特殊的坐标系,它建立了描述其它坐标系所需要的参考框架。
从另一方面说,能够用世界坐标系描述其他坐标系的位置,而不能用更大的,外部的坐标系来描述世界坐标系。
世界坐标系也被广泛称作全局坐标系或者宇宙坐标系。
关于世界坐标系的典型问题都是关于初始位置和环境的。如:
- 每个我们的位置和方向。
- 摄像机的位置和方向。
- 世界中每一点的地形是什么(如山丘、建筑、湖泊等)。
- 各物体从哪里来,到哪里去(NPC的运动策略)。
物体坐标系
某些情况下,物体坐标系也被称作模型坐标系。因为模型顶点的坐标都是在模型坐标系中描述的,有时候它也称作身体坐标系。
在物体坐标系中可能会遇到的问题如:
- 周围有需要互相作用的物体吗?(我要攻击它吗?)
- 哪个方向?在我前面吗?我左边一点?右边?(我应该向它射击还是转身就跑?)
摄像机坐标系
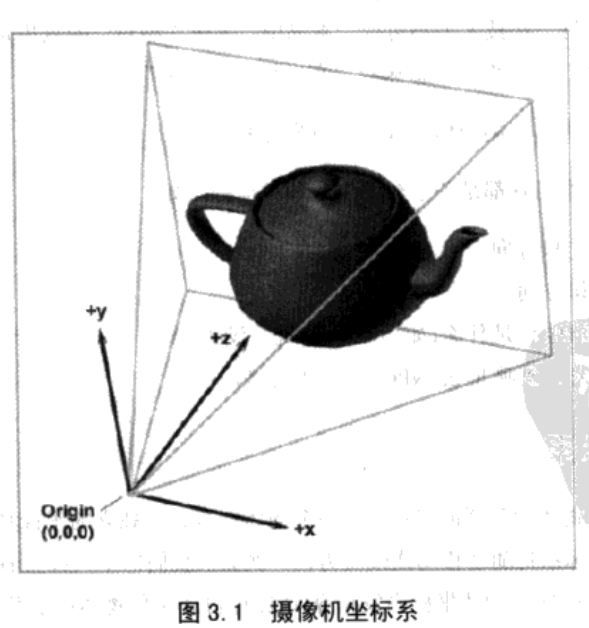
关于屏幕坐标系的典型问题是哪些物体应该在屏幕上绘制出来。如:
- 3D空间中的给定点在摄像机前方吗?
- 3D空间中的给定点是在屏幕上,还是超出了摄像机平截锥体的左、右、上、下边界?(平截锥体就是摄像机能观察到的区域)
- 某个物体是否在屏幕上?它的部分在,或全部不在?
- 两个物体,认在前面?(该总是称作可见几天检测)
惯性坐标系
惯性坐标系的原点和物体坐标系的原点重合,但惯性坐标系的轴平行于世界坐标系的轴。
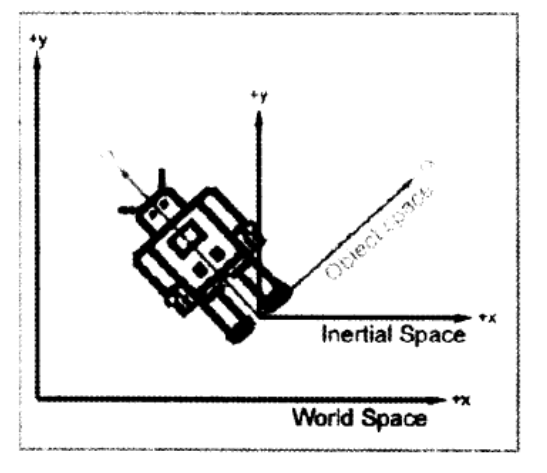
机器人的物体坐标系、惯性坐标系和世界坐标系
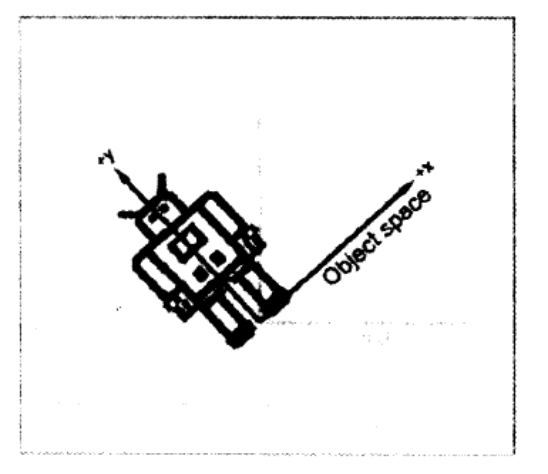
机器人的物体坐标系
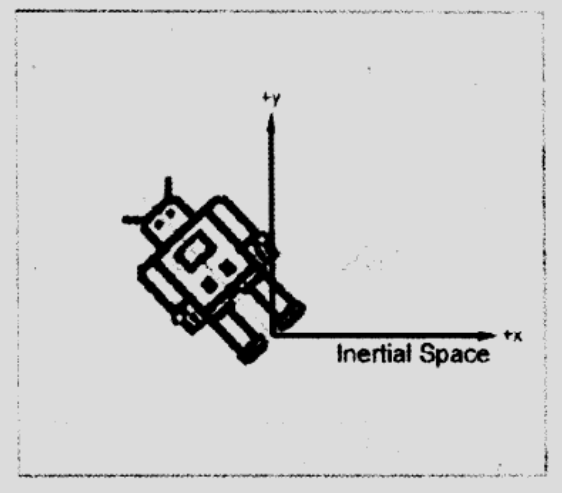
机器人的惯性坐标系
世界坐标系
为什么要引入惯性坐标系?
因为从物体坐标系到惯性坐标系只需要旋转,从惯性坐标系到世界坐标系只需要平移。